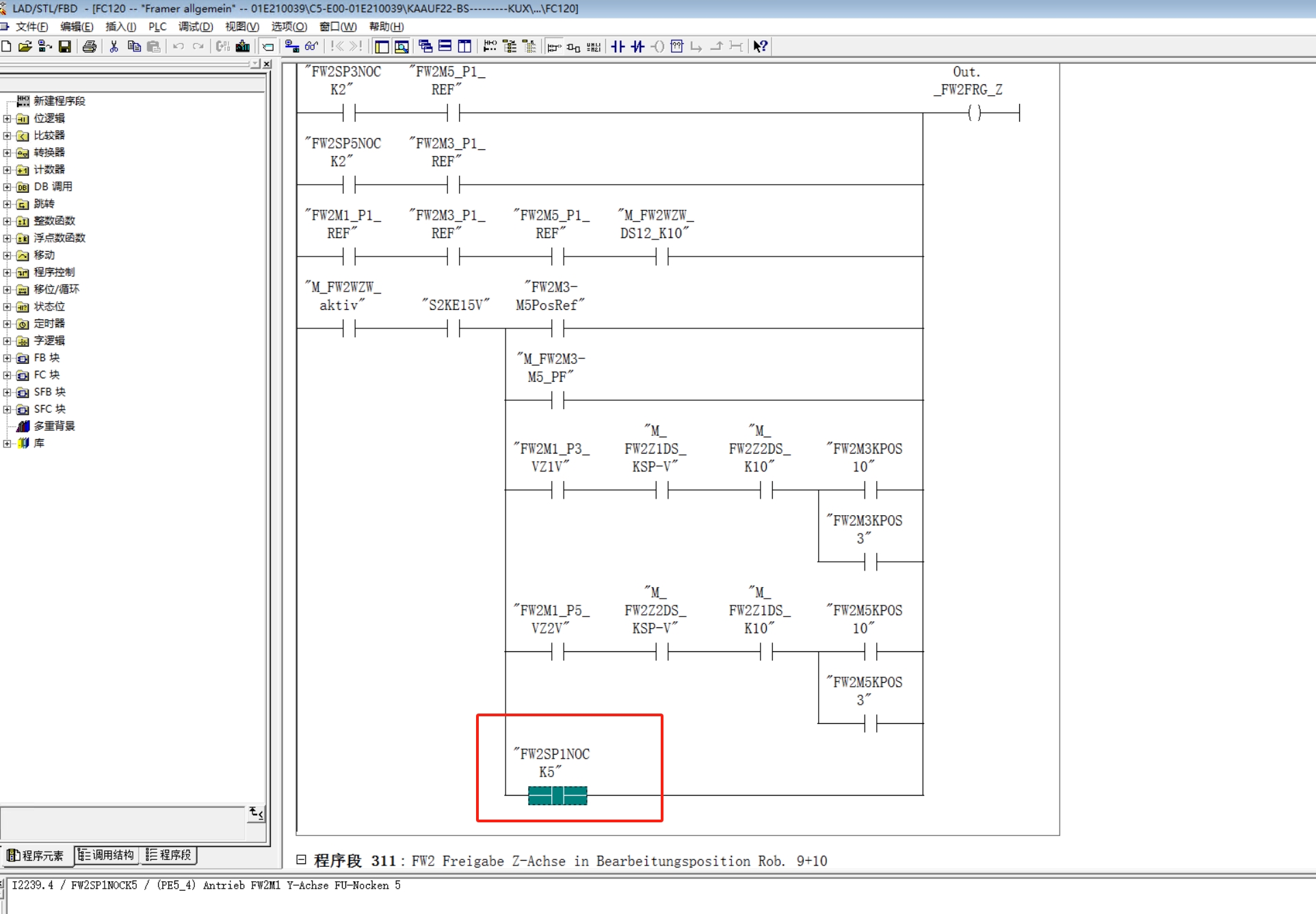
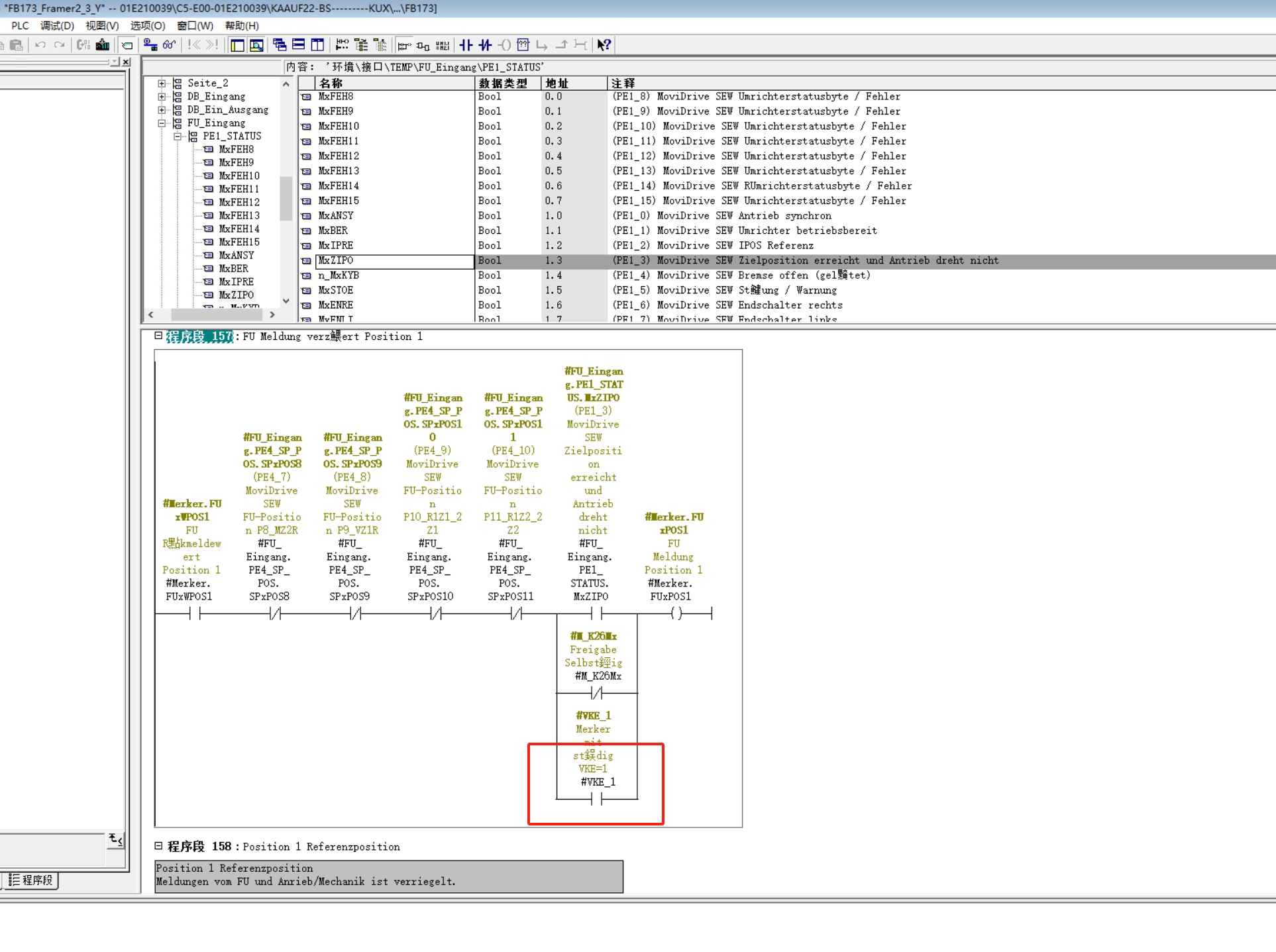
这台变频器驱动转台架,有4个位置,存放4个抓手夹具供机器人柔性切换抓手使用。故障现象机器人不去切换抓手,HMI上转台架对应的位置信号报错。 查看程序,i1207.2(变频器状态字位置3)、i303.6(位置3 接近开关) 都有信号,i1201.3 丢失导致 最终3号位M4204.0 条件不满足。确认实际位置正常后短接该信号完成机器人对接后,手动操作去3号位,i1201.3信号就有了。
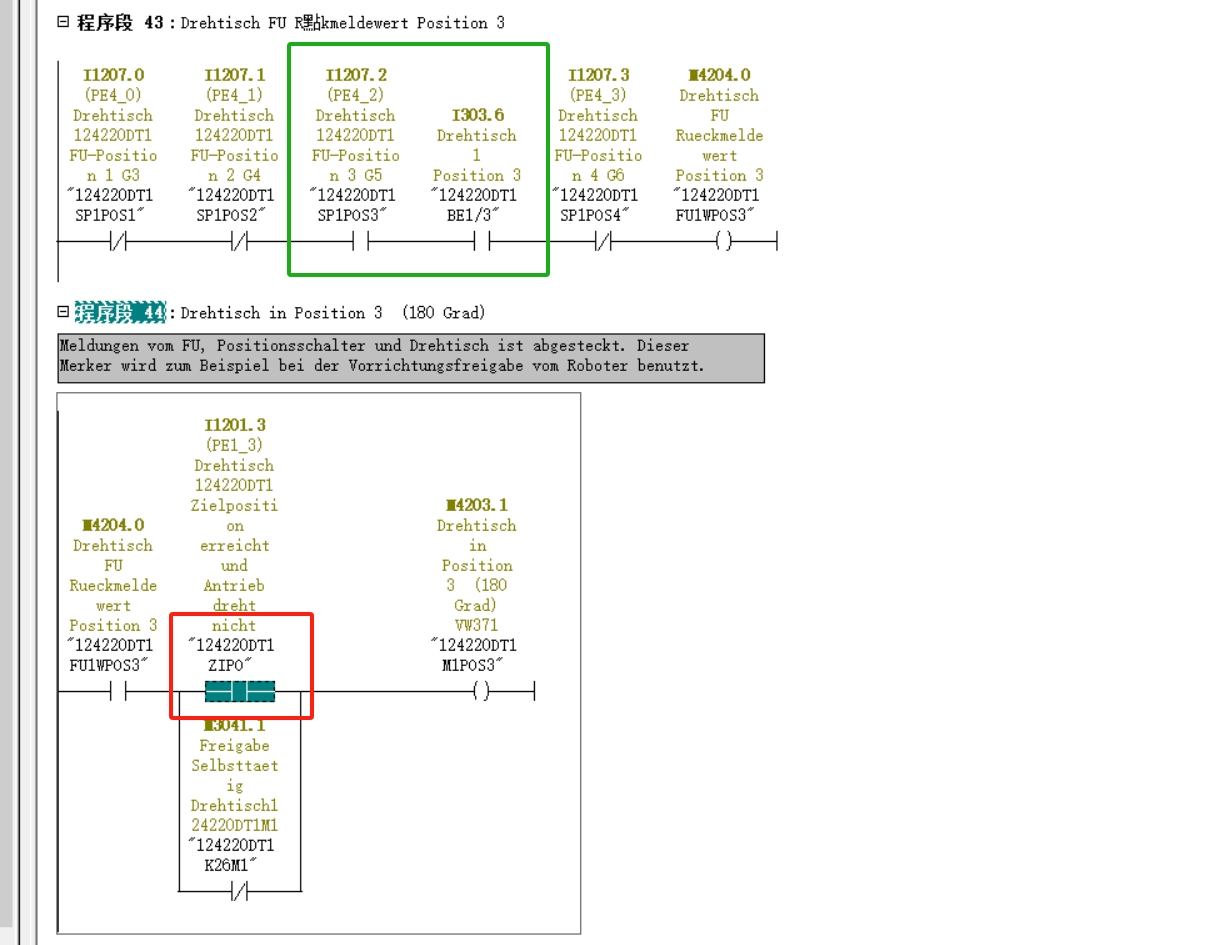
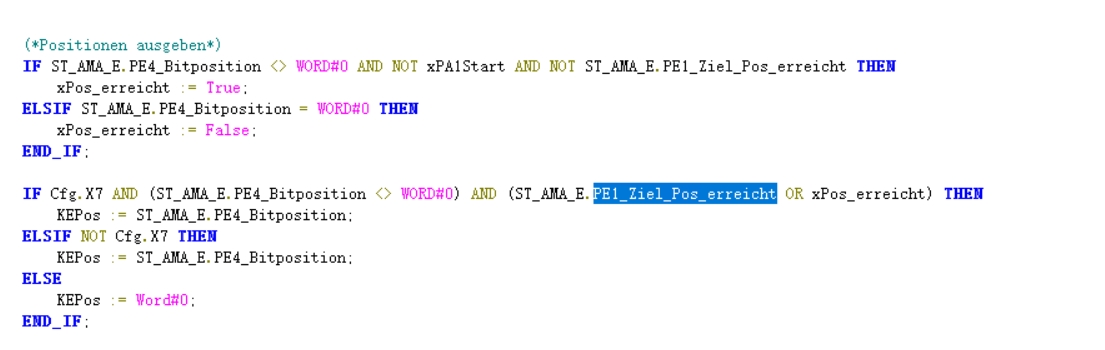
故障处理的流程很简单,当时不明白这个i1201.3是什么?故障再次出现后发现 变频器发生总线故障断网时 这个i1201.3(PE1_3)会丢失。既然位置、和接近开关信号都正常,分析i1201.3(PE1_3)程序中是否可以短接。
查询MOVIDRIVE AMA定位控制字 对这个P1_3 的描述是 目标位置到达
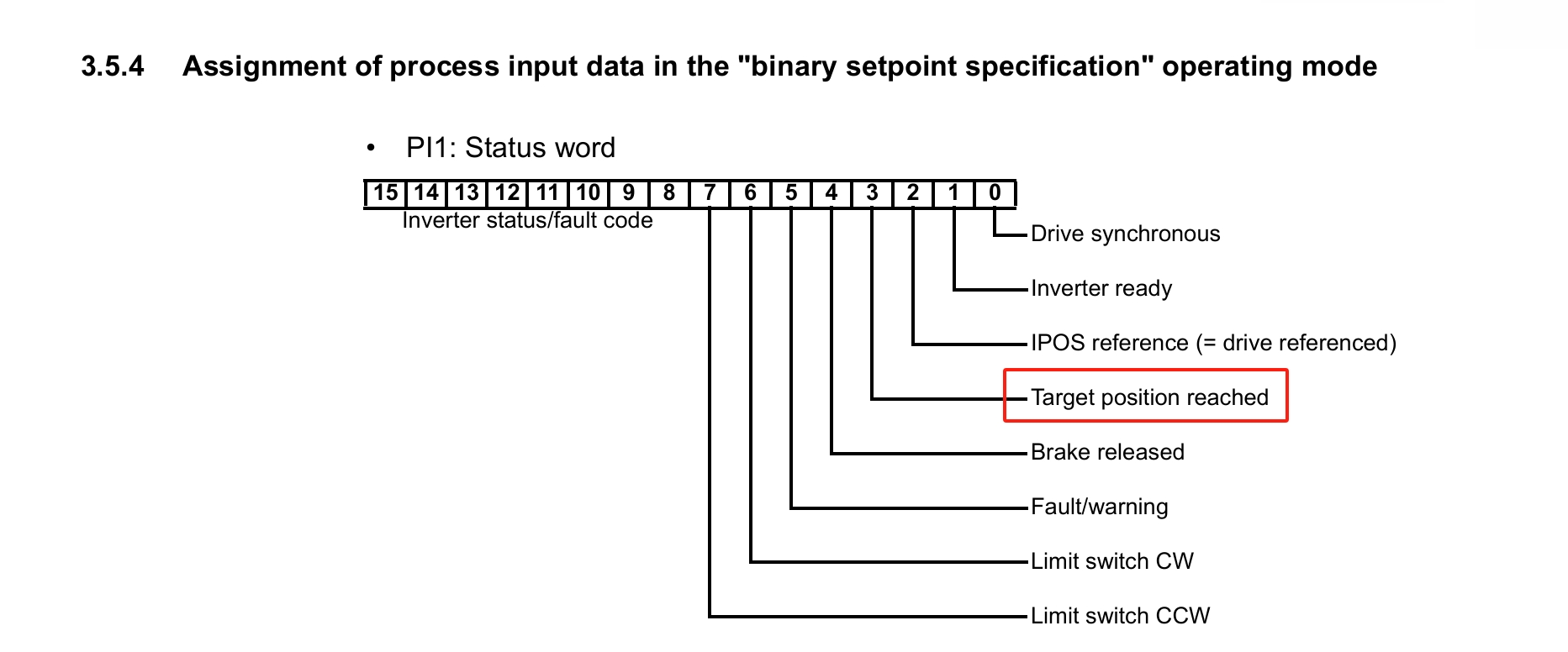
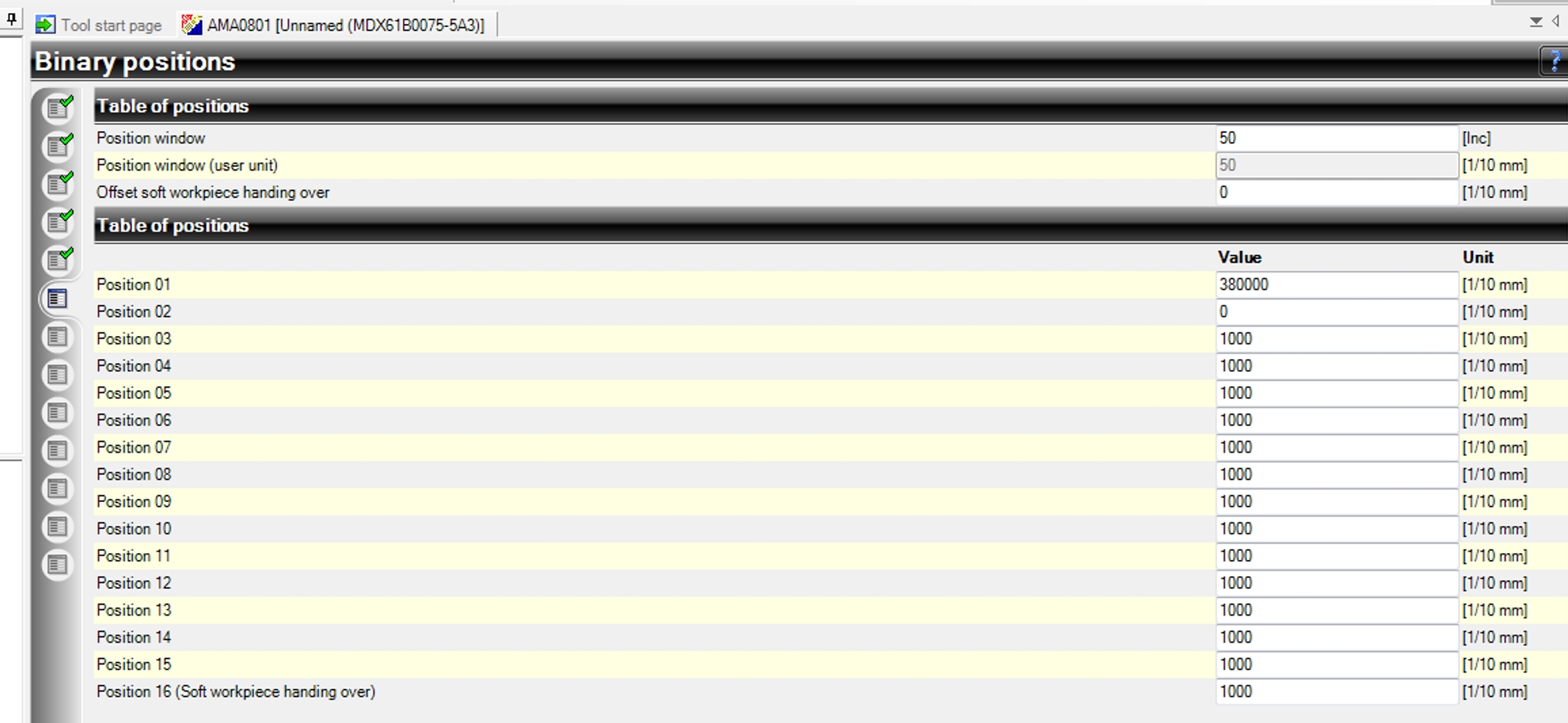
二进制控制方式,硬件组态6WORD长度
PI4 为 16个位置,那么P1_3 目标位置到达确实可以不需要。
对比其他使用 MOVIDRIVE 的PLC程序,发现均未使用。西门子V90中也有类似值(ZSW1_Bit10 到达目标位置),充分验证后 删除P1_3后运行正常。
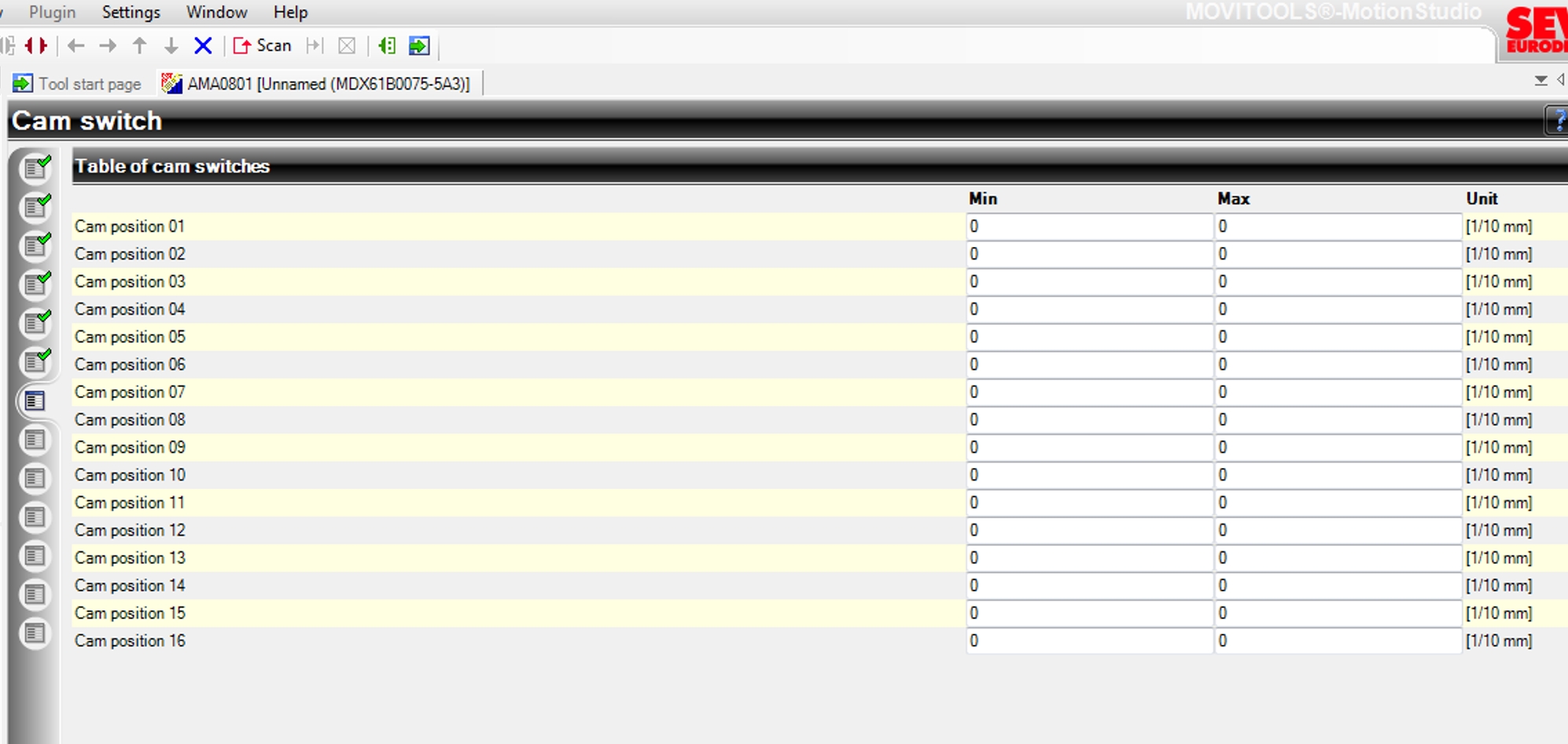
还遇到一个HAGER的设备PI5 凸轮bit位 故障,一般这个点在AMA中不做设置并不使用,对应的bit位设置编码器的范围值,PI5对应的位就有信号,用于设备的互锁。