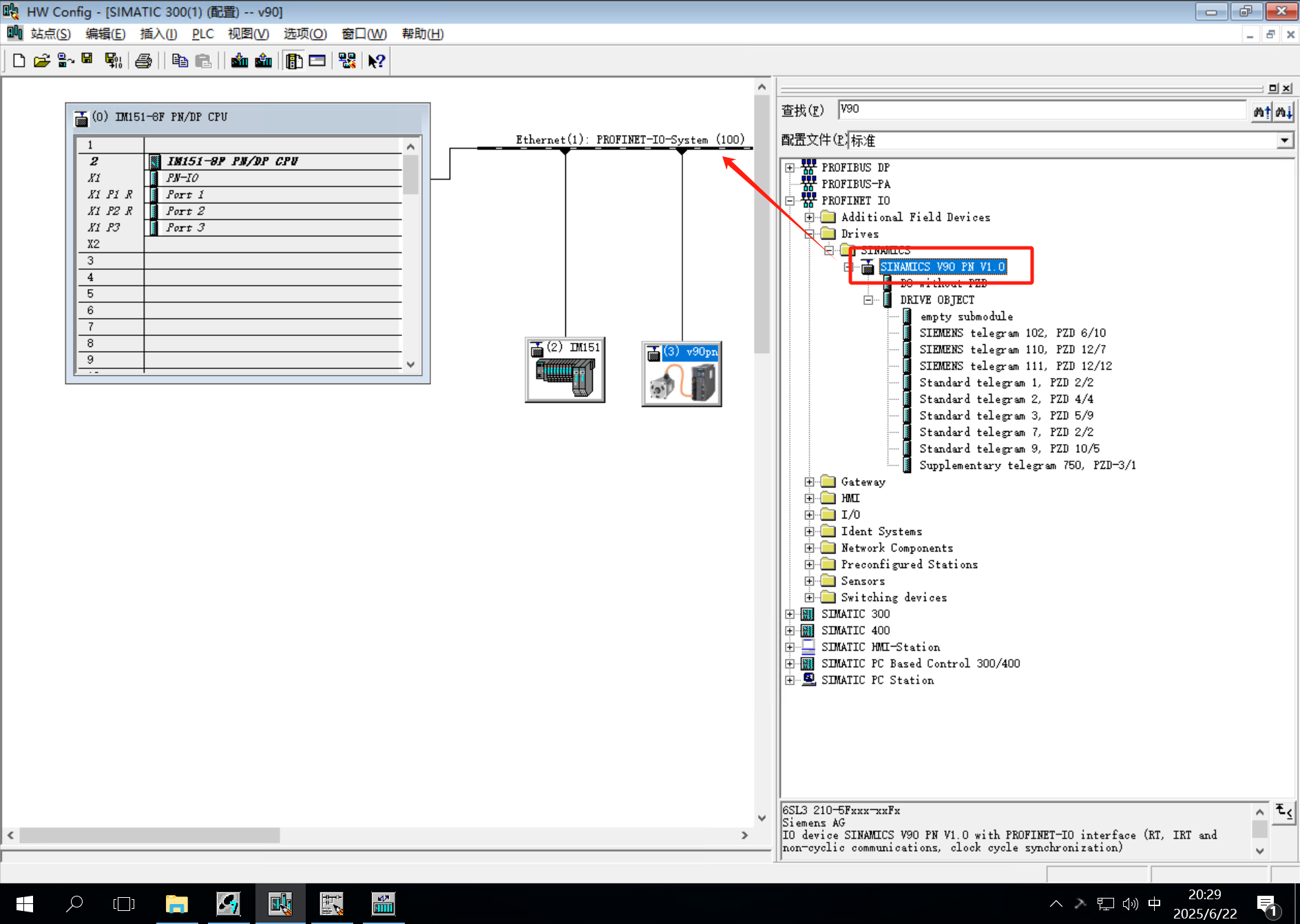
西门子V90伺服速度控制,报文1可以精准控制速度
组态步骤:
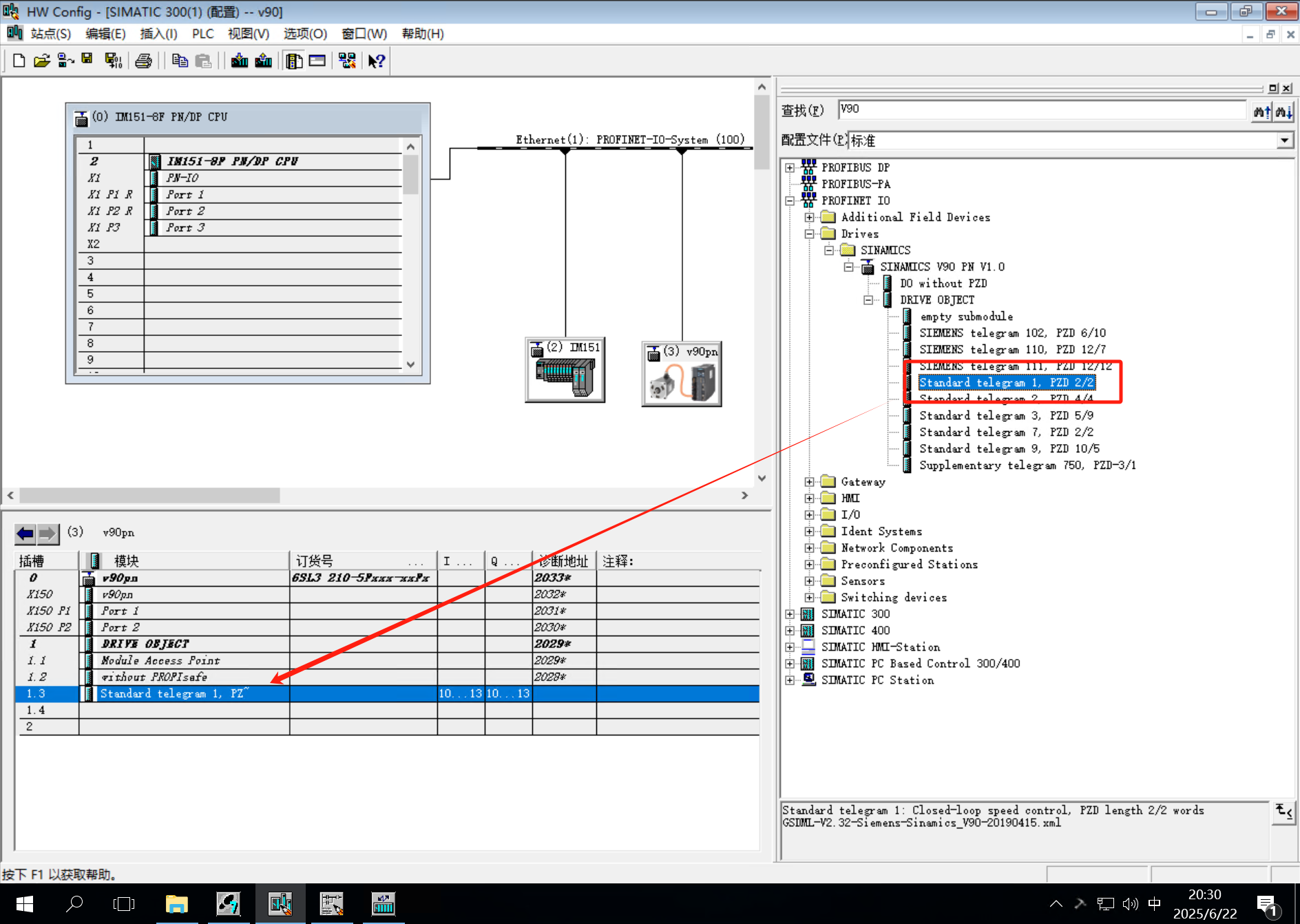
报文1输入输出各有2个字,第一个字控制状态,复位上使能,第二个用于发速度。同理第一个接收状态,第二个反馈当前速度值。
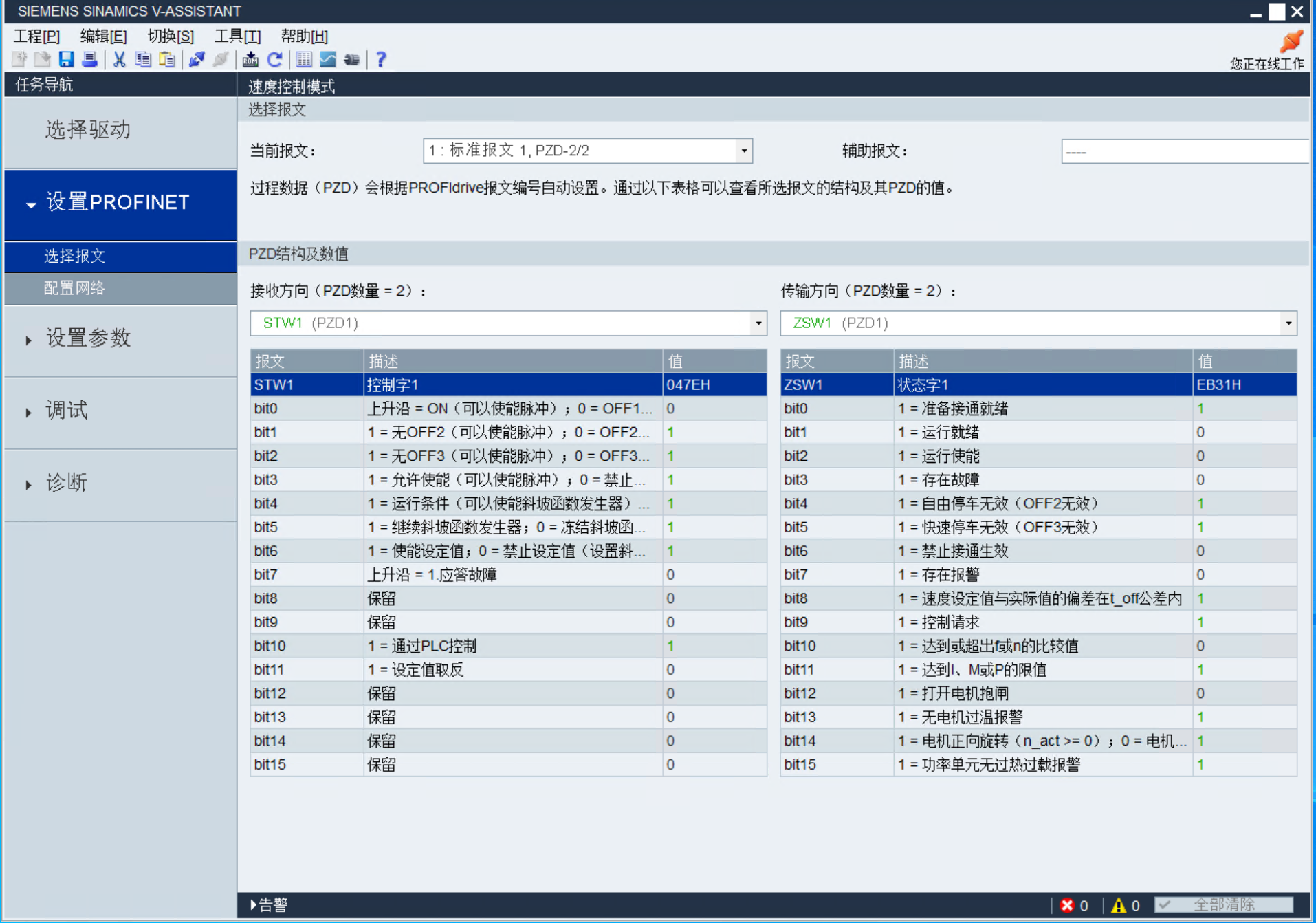
以我配置i10-i13,q10-q13 为例,要注意的是西门子的字高低位是相反的,STW1的bit0-7则是i11.0-i11.7。bit10(i10.2)要设常为1,由PLC控制。Bit1-bit6要先设置为1后 bit0再设为1,电机才能启动。Bit0是上升沿触发信号,当其他未的使能变为0以后,bit0需要重新设为1。一般可以直接发送控制字 47E(停止),47F(启动) 。如果初始状态为0直接发47F则无法启动。
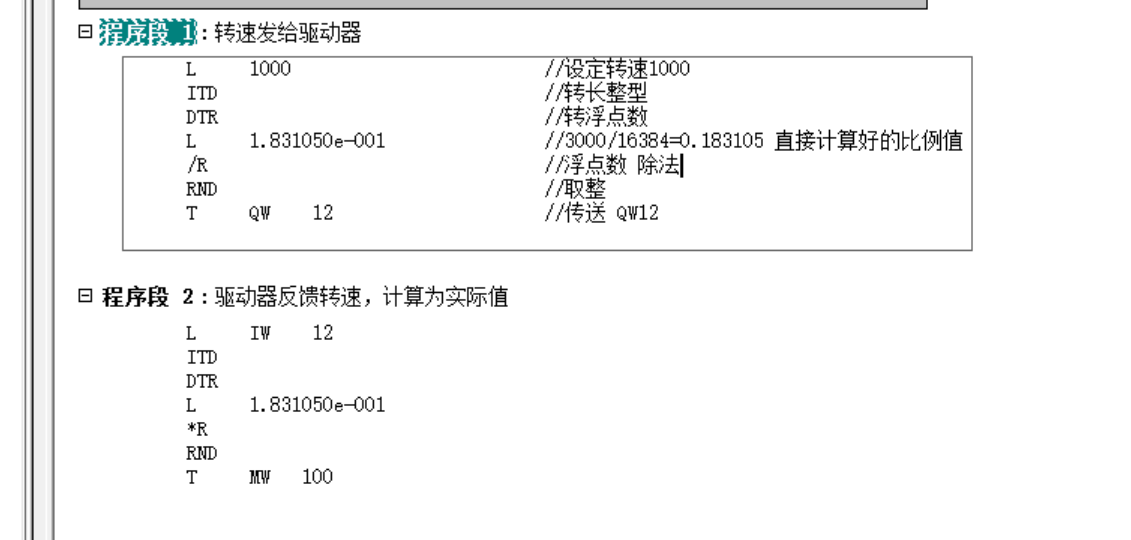
速度、方向由第二个字控制(q12-q13),16位的有符号整数型变量,电机的正反转通过发速度的正负值来设定。 电机的转速控制和参数P2000有关,我的为3000转/分,速度字最大为十六进制4000对应3000转,十六进制就是16384对应3000。例如发1500转速,对应关系为1500*3000/16384=8192。 学习过程中遇到数据类型以及符号的问题,必须正确执行否则值对应不上。注意点 乘法运算会导致数值大于16位,需要转长整数型D,除法会有小数点,要转为浮点数。(转长整型-转浮点数-运算-取整为长整型)
以STL程序为例(梯形图中间需要多加中间变量来过渡)